Kevin Costner
Kevin Costner
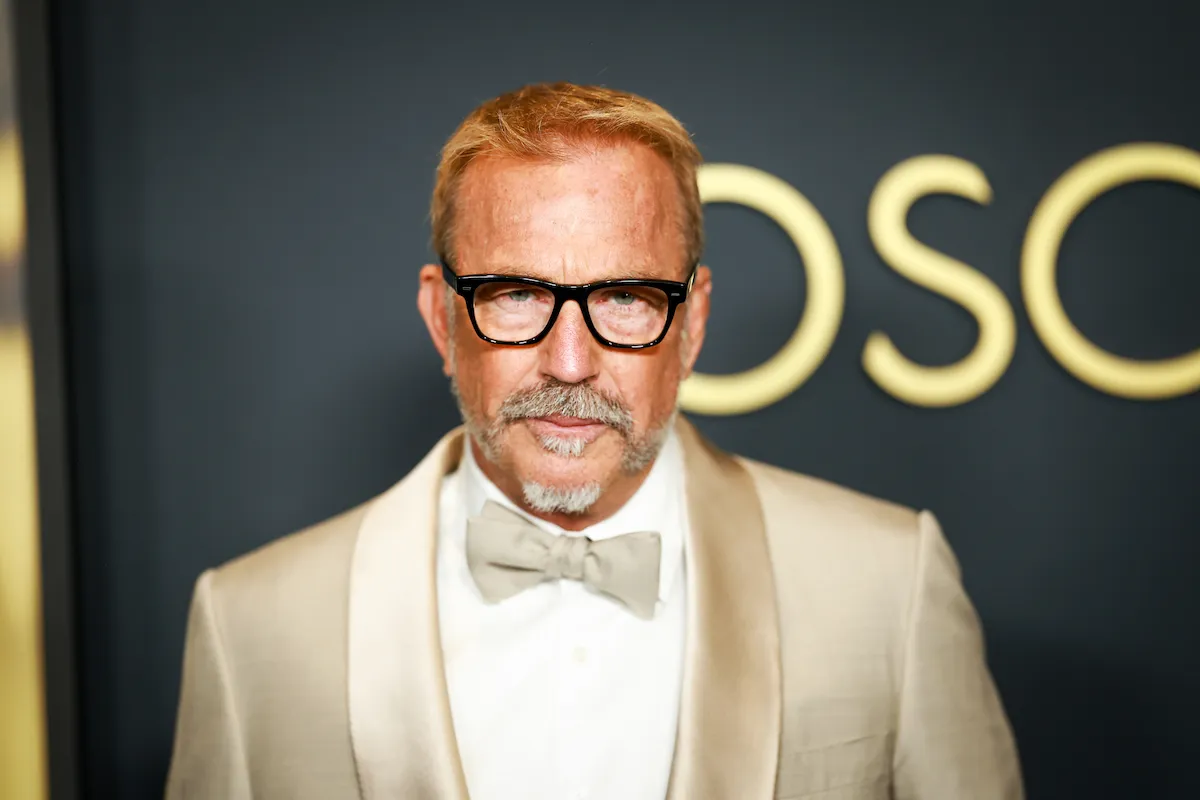
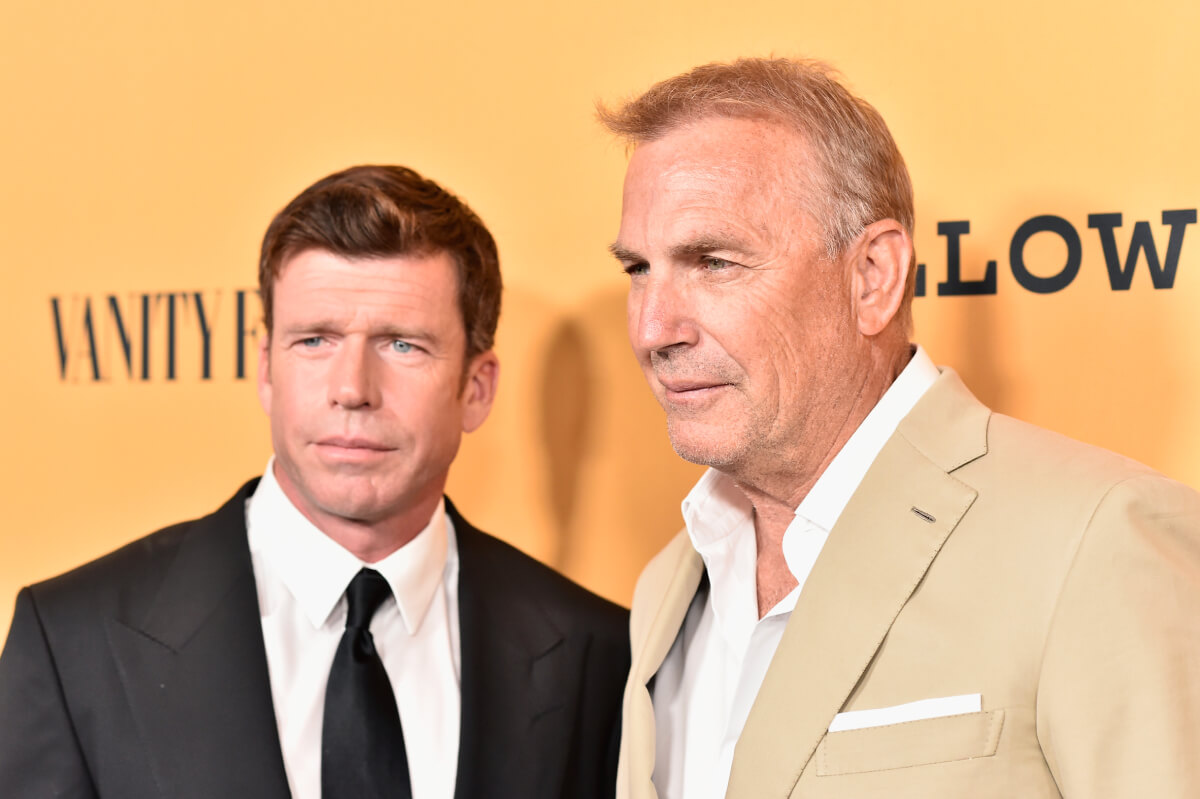
Kevin Costner is an American actor and filmmaker. He rose to fame in the late 1980s and early ’90s starring in films including Field of Dreams, JFK, and The Bodyguard. It was during this era that he also produced and starred in the western Dances With Wolves, which earned him Academy Awards for Best Director and Best Actor.
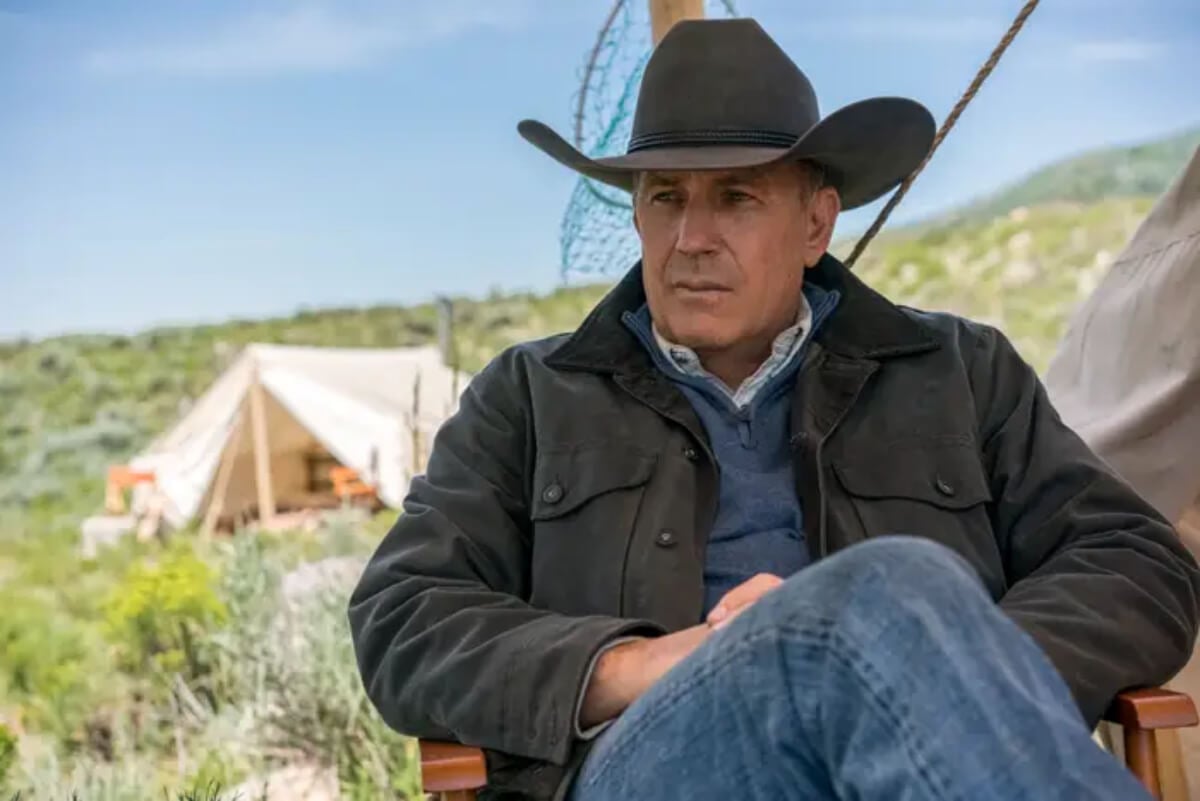
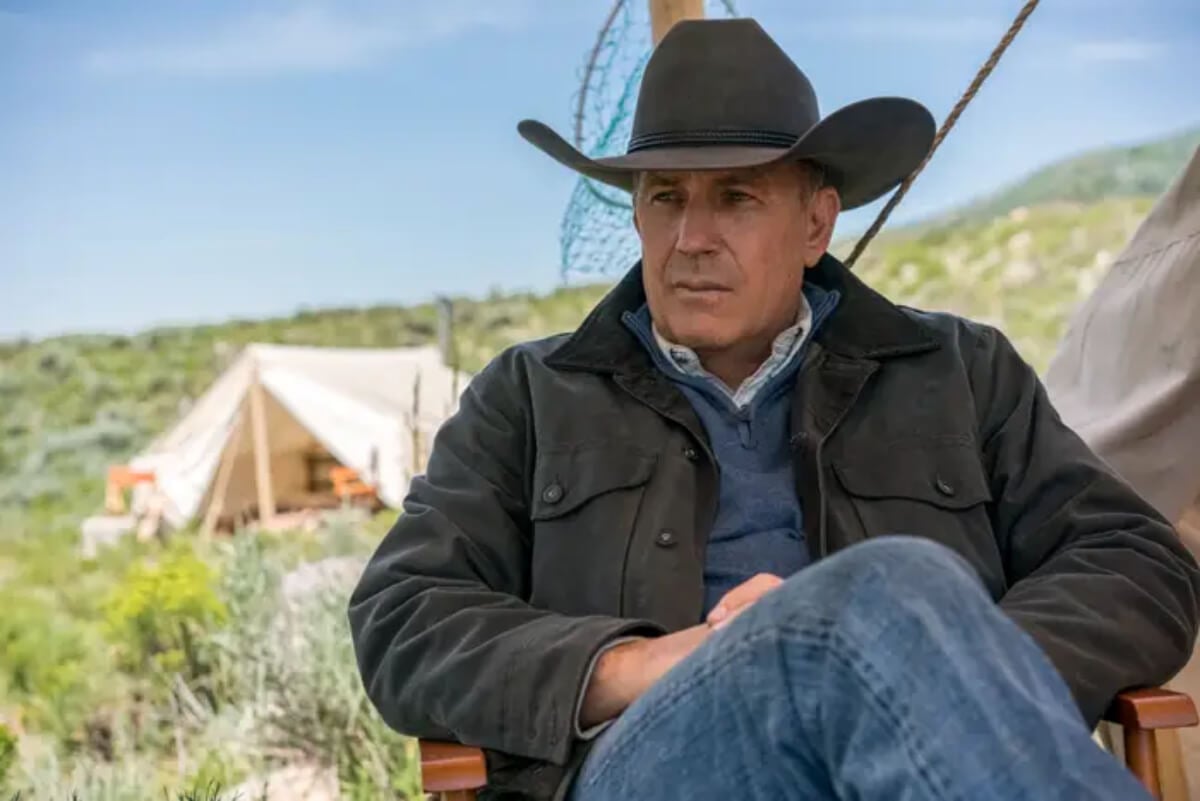
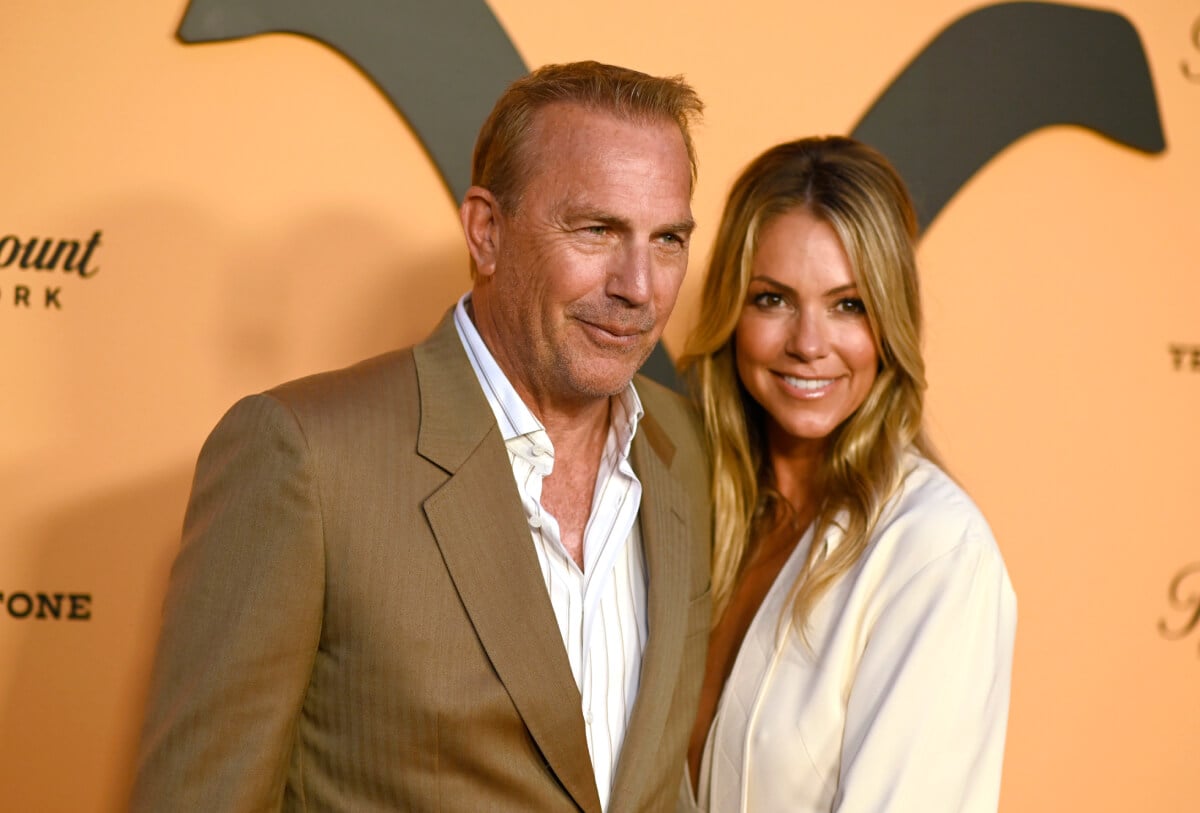
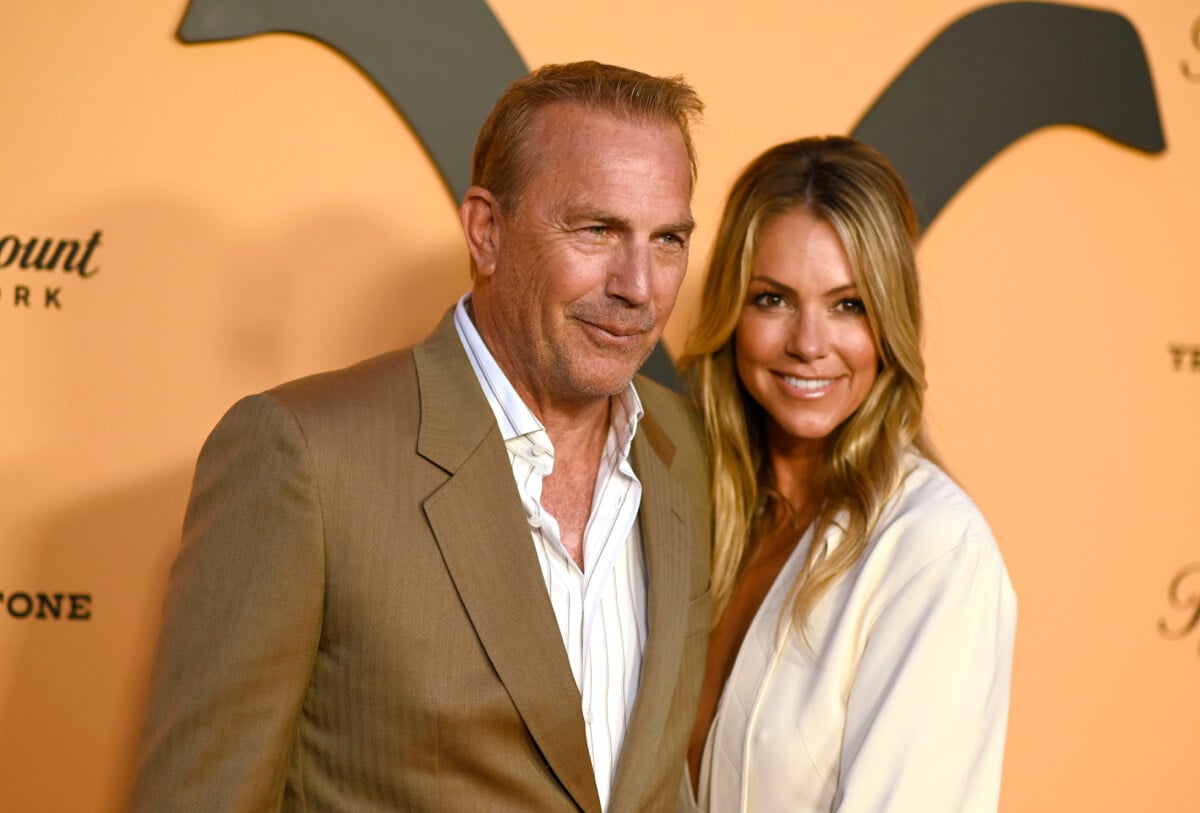
Costner’s acting career in movies and TV shows spans the last three decades, most recently for the role of John Dutton in Paramount’s Yellowstone. In September 2023, Costner finalized the contentious divorce from his ex-wife, Christine Baumgartner, whom he married in 2004.
- Full name: Kevin Michael Costner
- Born: January 18, 1955
- Height: 6′ 1″
- Hometown: Compton, California
- Net worth: $250 – $400 million
Follow Kevin Costner on Instagram.